Data Sets
<-- back homeExperiment Recordings
These data sets are recordings of closed-loop experiment runs that demonstrate library functionality. They are recorded as rosbags. All data sets released under CC BY 4.0 license.
- e02: Longitudinal Colliding Reciprocal Dance

- Demonstration of colliding reciprocal dance issue in simple longitudinal scenario
- Three mitigation strategies are testing: constraint tightening, conservative deceleration, and none
- Includes RViz config for easy viewing
- e01: Short AR slalom with Image Space Potential Field Navigation

- Six second run demostrating ar_isp_field control package
- Guidance control is constant forward throttle and centered steering
- Staggered obstacles obstruct the agent's path
- The controller computes ISP fields from camera input and perturbs the guidance control to avoid collision
- Slideshow for experiment: https://youtu.be/BaHekhZmkfY
Simulation Sequences
These data sets are open-loop simulation sequences provided by Parallel Domain. All data sets released under CC BY 4.0 license.
- s05: Hills with transverse traffic

- 175 frame, medium resolution visual of traveling along a hilly road with transverse traffic
- Ground truth, per-pixel semantic segmentation with blur noise
- 1280x720 resolution
- Includes source simulation movies
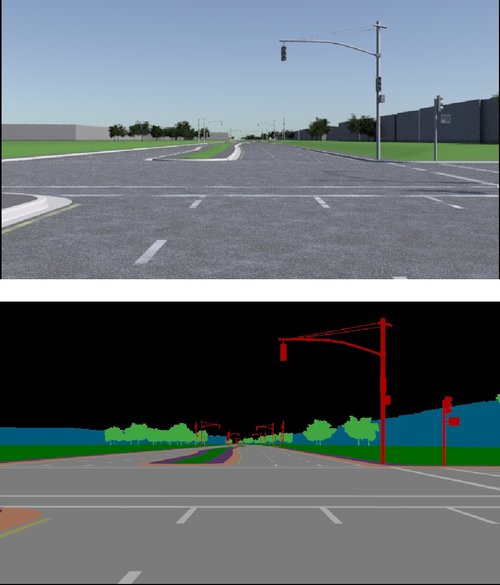
- s04: Road fork

- 300 frame, medium resolution visual of an approach and traversal of a forked road
- Ground truth, per-pixel semantic segmentation with blur noise
- 1280x720 resolution
- Includes source simulation movies
- s03: Two car slalom

- 300 frame, medium resolution visual of an approach and slalom between two cars
- Ground truth, per-pixel semantic segmentation with blur noise
- 1280x720 resolution
- Includes source simulation movies
- s02: Truck approach from behind

- 215 frame, medium resolution visual of an approach on a truck from behind on an uneven street
- Ground truth, per-pixel semantic segmentation with blur noise
- 1280x720 resolution
- Includes source simulation movies
- s01: Low-res fly-through
- 90 frame, low resolution fly through of an empty street with some infrastructure and lightly populated environment
- Ground truth, per-pixel semantic segmentation
- 768x432 resolution
- Includes raw data and rosbag versions